{kind=link}
{kind=link}

EAWM
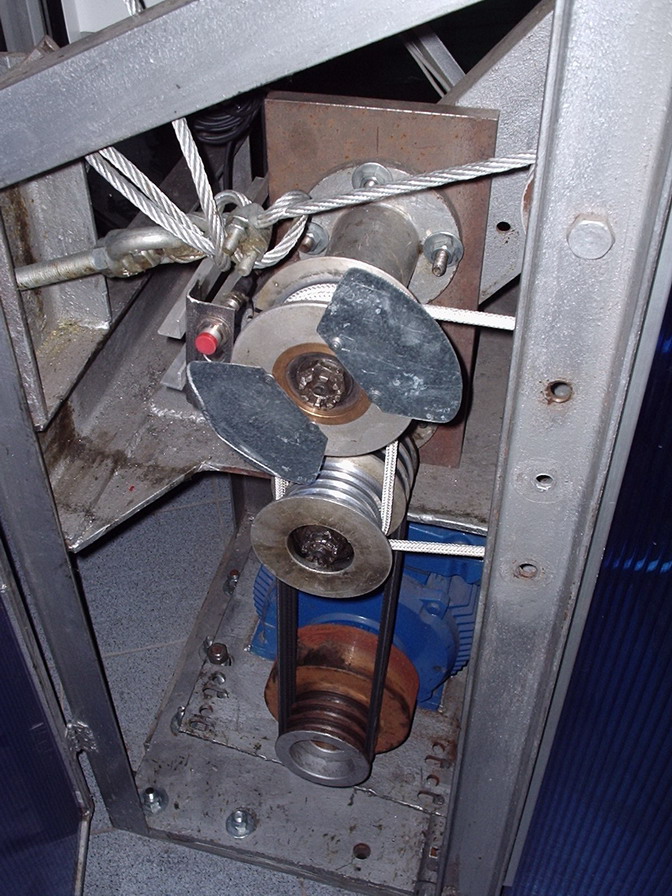
Electronic Assistant to Winch Management - Электронный Помощник Управления Лебёдкой (ЭПУЛ). Точнее, система слежения за перемещением верёвочного каната (лебёдки). Канат перемещается при помощи блока запасовочных роликов приводимых в движение мощным трёхфазным двигателем. На одном из роликов установлены датчики квадратурного энкодера. Система подсчитывает импульсы и переключает выходные реле, в зависимости от текущего положения лебёдки. Всего имеется четыре таких реле и четыре контрольных точки которые можно запрограммировать. Счётчик десятичный, до 9999. Может крутиться по кругу :-). Контрольные точки и текущее положение лебёдки запоминаются в EEPROM устройства и сохраняются в нём даже после отключения питания. Устройство универсальное и может использоваться для различных целей. В данный момент оно установлено в бассейне для перемещения лыжников - вейкбордистов.
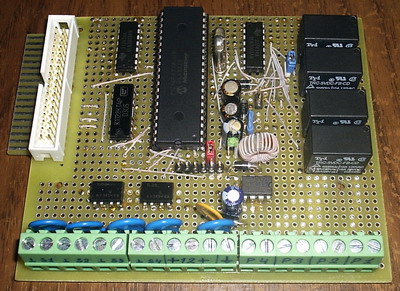
Работа устройства происходит под управлением PIC микроконтроллера и многозадачной RTOS - DTmOS оболочки. Имеет динамическую индикацию и возможность подключения к COM порту компьютера, а значит и управления с его помощью.
EAWM-2
Теперь с блоком управления мощным трёхфазным инвертором и задатчиком скорости перемещения! Заодно в программу внесены некоторые дополнения, позволяющие контролировать выход из строя одного или же обоих датчиков квадратурного энкодера.

{kind=link}
{kind=link}